Podvozek robota
Podvozek robota je vyroben z překližky o tlouštce 6 mm, má 30 cm na délku a 20 cm na šířku. Už od počátku stavby robota zažil mnoho velkých změn, takže je v něm plno větších či menších děr, které nejsou nijak využity. Původně byly na podvozku jen čtyři motory, ale jak se měnil způsob pohonu a nahoře přibývalo modulů, je dnes docela slušně zaplněn.
Původně byly na podvozku jen čtyři motory, ale jak se měnil způsob pohonu a nahoře přibývalo modulů, je dnes docela slušně zaplněn.
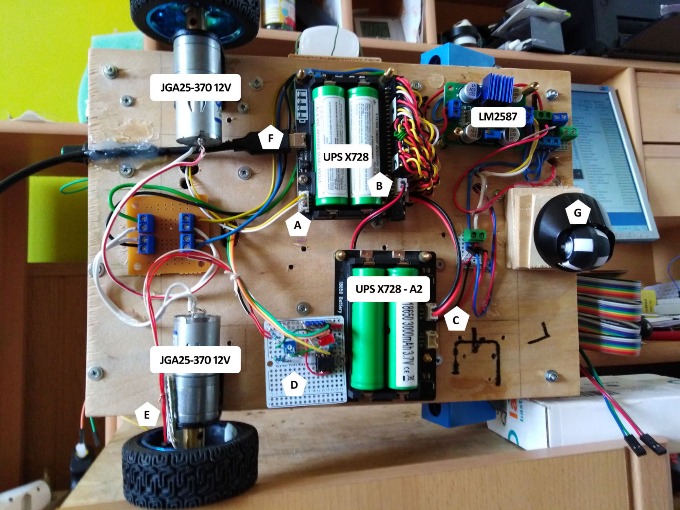
- Na pravoúhlých nosnících jsou uchycena 2 kola JGA25-370 s napájením 12V. K vnitřní straně disků kol jsou po obvodu přilepeny papírové pásky, střídavě s bílými a černými pruhy. Přechody mezi černou a bílou jsou snímány infračervenými reflekčními čidly, které při otáčení kol generují analogové impulzy. Ty jsou pak v modulu D převedeny na impulzy digitální, logické jedničce odpovídá napětí 3.3V (na obrázku je pouze jedno čidlo, druhé v době pořízení fotografie ještě nebylo nainstalováno).
- Na distančních sloupcích je připevněna deska X728 se dvěma Li-Ion akumulátory typu 18650. Deska slouží jako zdroj nepřerušitelného napájení (UPS). Klubkem vodičů je spojena se 40ti pinovým systémovým konektorem Raspberry a konektorem USB-C (uzel F) je připojena k externímu napájecímu adaptéru 5V, 3A. Raspberry je tak napájeno z desky X728 a jeho napájecí konektor USB-C pak v žádném případě nesmí být použit k napájení!
- Na desce je dále konektor A, který je připojen k mžikovému tlačítku a robot se jím zapíná a vypíná. Pro vypnutí je třeba tlačítko držet asi 14 vteřin.
- V bodě B je shora desky konektor výstupu zálohovaného napětí 5V, 3A pro napájení externích modulů, takže není zatěžována deska Raspberry. V našem případě jsou odtud přes měnič napětí (step-up booster) napájeny motory.
- Z druhé strany desky je v tomto místě konektor, kterým je v bodě C připojena deska X723-A2 s další sadou baterií Li-Ion 18650, čímž je o 100% zvýšena kapacita UPS.
- Vpravo od desky X728 je umístěn měnič napětí (step-up booster) LM2587, který umí nižší vstupní napětí převést na napětí vyšší. V našem případě převede napětí 5V na 12V pro napájení motorů.
- Uprostřed přední části podvozku je ve dvou kuličkových ložiscích upevněno pojezdové kolo z robotického vysavače (G).