Vývoj robota (podle verzí sestupně)
Verze 2.3: Kamil má snímače otáček poháněných kol, které ve spojení s ovládacím algorytmem umožňují při jízdě vyrovnávat stranové odchylky plynoucí z nestejné práce motorů. V programovacím jazyce KemoPro přibyly operační kódy pro vícevláknové úlohy, aby např. bylo možno při jízdě přehrávat audio a k tomu pohybovat hlavou.
Verze 2.2: Kamila jsme opatřili vysílačem pro bezdrátový přenos dat z druhého portu HDMI na přijímač, který do vzdálenosti 30m poskytuje vstupní port HDMI pro TV nebo projektor.
Verze 2.1: To to trvalo! Kamil při jízdě stále poměrně dost vybočoval stranou. Bodejď by ne, když poměr zatížení předních hnaných kol a zadního pojezdového kola byl 1:3,5! Vrtáme do podvozku další díry a prohazujeme umístění kol mezi předkem a zadní částí podvozku. Teď už poměr zatížení vypadá podstatně lépe. Do těla robota jsme nainstalovali upravený dálkový ovladač Extol Light, který umí bezdrátově spínat tři zásuvky 240V, 10A. V programovacím jazyce KemoPro přibývají další operační kódy...
Verze 2.0: Pokorně se vracíme ke dvěma poháněným kolům a jednomu pojezdovému. Pojezdové kolo z verze 0.99 jsme jen zaměnili za kolo z uklízecího robota, které má obě osy otáčení blíž u sebe než to původní pojezdové kolo, a zmenšuje tak tendenci vybočování vozidla do stran, což se děje zejména při razantní změně směru jízdy (vpřed <=> vzad). Vyměnili jsme motory za silnější dvanáctivoltové a došlo i na výměnu kol a jejich obutí - z plastu na pryž. V programovacím jazyce KemoPro přibyly další operační kódy...
Verze 1.5: Na pupíku robota Kamila přibyla sedmipalcová LCD obrazovka. Je připojena k HDMI-1, takže když je zapnutá, ukazuje start operačního systém Raspbian a stavá se jeho primární obrazovkou. Protože se jedná o většího žrouta el. energie, zapíná se SW přes relé, jen když je potřeba.
Verze 1.4: Vodiče (dráty) a zase vodiče (dráty) robota Kamila, propojte se! S přibývajícími moduly nám houstne síť kabelů, které to vše správně propojují. V předešlé verzi už proběhla jistá léčba kabeliozity, ale zase přibyly nějaké moduly...
Verze 1.3: Kamilovi přibyl čtyřkanálový přijímač na 433MHz, ovládání poskytuje vysílač ve formě přívěsku na klíče s tlačítky A, B, C a D. Univerzální věc pro nejrůznější aplikace, např. ruční řízení pojezdu robota (A vpřed, B vzad, C vlevo, D vpravo) nebo 4 možné odpovědi na otázky v kvízu...
Verze 1.2: Přibyly tři digitální voltmetry pro kontrolu napájecích napětí 3.3V, 5V Raspberry, 5V z UPS. Zase něco barevných světýlek nejen pro vánoční výzdobu, ale taky zjištění, že když Kamila zapínám a na některém displeji září 0.00, je něco špatně. Ovládací program robota má prvních 3000 řádků.
Verze 1.1: Instalace kompasu, hlavy se dvěma servy pro otáčení a kývání, 3 ultrazvukové dálkoměry... Rozhodnuto o vytvoření programovacího jazyka KemoPro - ovládání robota jednoduchými, laicky pochopitelnými operačními kódy pro začátečníky (jeď vpřed 20 cm, otoč se na azimut 120, přehraj audio soubor se jménem abcd_kočka_přede...) i komplikovanějšími operačními kódy pro pokročilé.
Verze 1.0: Jali jsme se budovat nového Kamila z překližky, latěk, zúčastnily se i české matičky, šroubky a hřebíčky. Zkrátka co dům dal. Tak vznikla vana podvozku o rozměrech 30x20cm s postranními bočnicemi, vpřed a vzad otevřená. Teď bylo třeba vyřešit, na čem bude Kamil jezdit. Trojkolý podvozek verze 0.99 se nám moc nezamlouval, protože špatně držel stopu a uhýbal na stranu. To podvozek se čtyřmi koly by měl být stabilnější. Nojo, ale čtyřkolý musí mít nějakou řízenou nápravu! Tak jsme objevili zrádnou krásu kol Mecanum Omni, kterými je možno měnit směr jízdy bez nutnosti kola natáčet. Jistou dobu to fungovalo. Jak ale Kamil postupně přibýval na hmotnosti (lidově "na váze"), ztrácela ta zázračná kola schopnost přenášet sílu motorů na podložku.
Verze 0.99: První "robotické" pokusy proběhly na komerční stavebnici podvozku z plexiskla, viz obrázek. Místo držáku baterií bylo na distančních sloupcích připevněno Rasperry s deskou napájení UPS a řadičem motorů, a jako první tykadlo do prostoru kolem vozítka byl ve směru vpřed na plošině instalován ultrazvukový měřič vzdálenosti. Byla to celkem hektická doba prvních pokusů s elektronikou, Linuxem i programováním v Pythonu, na nějakou dokumentaci se zdálo být příliš brzy, a asi proto se zachovala jen jedna fotografie první verze robota, ještě bez plošiny, jen distanční sloupky pro ni jsou už připraveny.
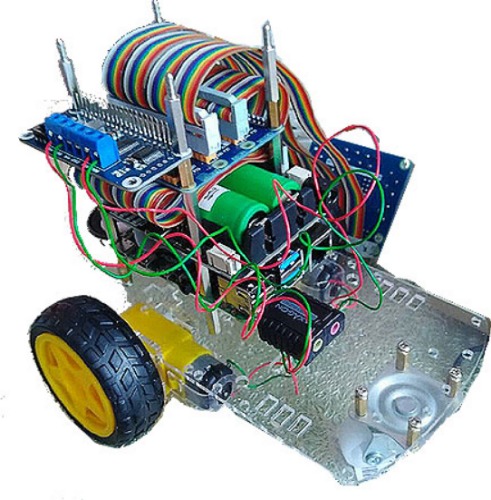
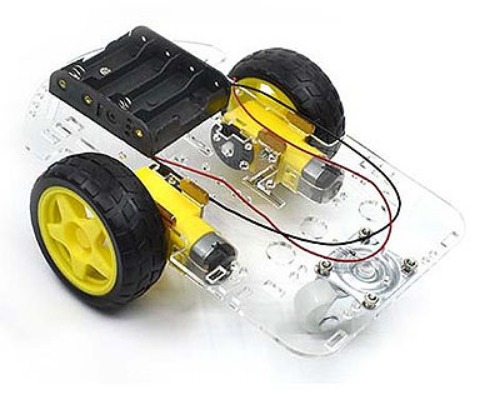
Brzy bylo jasné, že do té roboty půjdeme, ale že tělo robota bude muset být o hodně větší. Stávajícího průkopníka, který snad ještě ani neměl nárok na pojmenování, jsme nazvali Kamilem verze 0.99.