Řadiče motorů podvozku
Řízení pohonu kol zajišťují dva řadiče Waveshare Motor Driver HAT PCA9685 (rpishop.cz), každý pro 2 motory. Řadič ke své práci potřebuje připojení ke sběrnici I2C na piny SDA (GPIO 2 = pin 3) a SCL (GPIO 3 = pin 5), 3.3V (pin 1), 5V (pin 2) a GND (zemnění - pin 2). Tak, jak řadič koupíme, má adresu 0x40, další adresy můžeme nastavit spájením 2 pájecích bodů v polích A0 až A4. V případu Kamila dostaneme propojením bodů A0 adresu 0x41. Na svorky MA je připojen jeden motor, na svorky MB druhý, polaritu neřešíme - pokud se připojený motor bude točit na nesprávnou stranu, můžeme to změnit v programu. Když je přepínač vpravo od svorkovnice v pozici ON, jsou motory napájeny 5V z GPIO slotu Raspberry. Pokud přepneme na OFF, a připojíme ke svorkám GND a VIN napětí z jiného zdroje (v našem případu 5V z desky UPS X728), nebudeme zatěžovat napájení Raspberry.
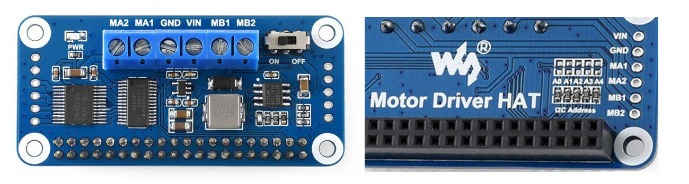
Konektor 2x20 pinů je u zařízení tzv. průchozí, tj. má ze strany adresních pájecích bodů konektor s dírami (F, female, samice), ze strany svorkovnice pak konektor s dráty (M, male, samec). Raspberry má na sobě konektor 2x20 M, do nějž by se teoreticky daly zastrčit na sebe 2 moduly řadičů motorů. Ten spodní by se ale nedal řádně připojit, protože bychom neměli přístup ke šroubům svorkovnice. U Kamila takový problém nemáme, protože řadiče motorů jsou umístěny ve vaně podvozku každý samostatně. Připojení ke slotu GPIO je pak řešeno dvěma třívodičovými kablíky přes piny 1, 3, 5 a 2, 4, 6. Výhodou vícevodičových konektorů je, že v protikonektoru lépe drží než konektory jednožilových vodičů.